Menu

私たちはお客様に寄り添い
Technology と Entertainment から成る
「新たな体験」を創ります。

XR(AR/VR)の進化は目覚ましく、新技術が絶えず生まれ、表現も日々豊かになっています。
ゲーム業界からスタートした私たちは、その強みを活かし、
最先端の Technology を Entertainment へと昇華させながらコンテンツを提供してきました。
どんなにすごい技術でも、最適な表現を加えなければ人々の気持ちを動かすことはできません。
また、お客様を深層から理解しなければ、最適な体験を生み出すことはできません。
私たちはお客様に寄り添いながら、
Technology と Entertainment から成る「新たな体験」を創ります。


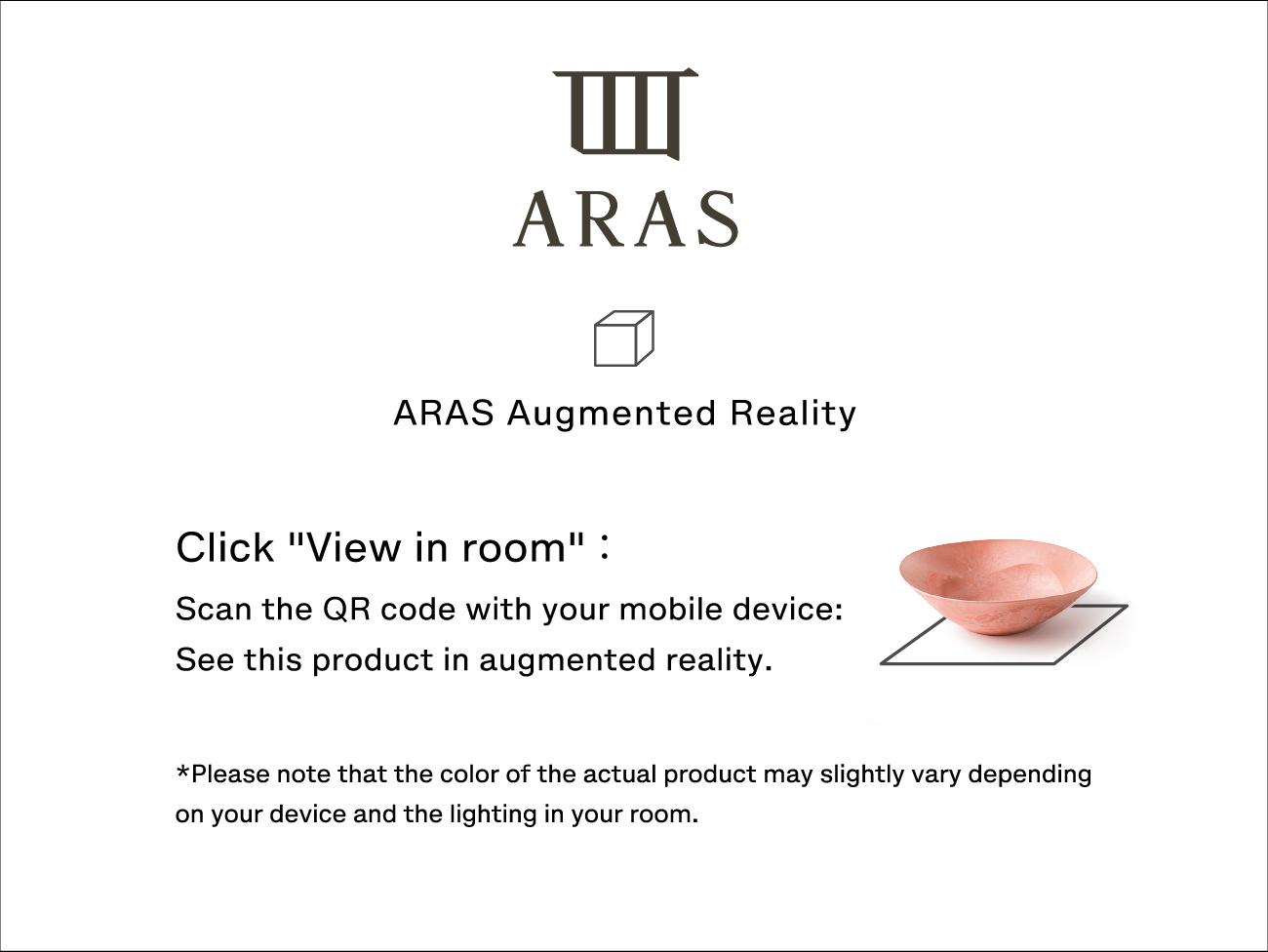
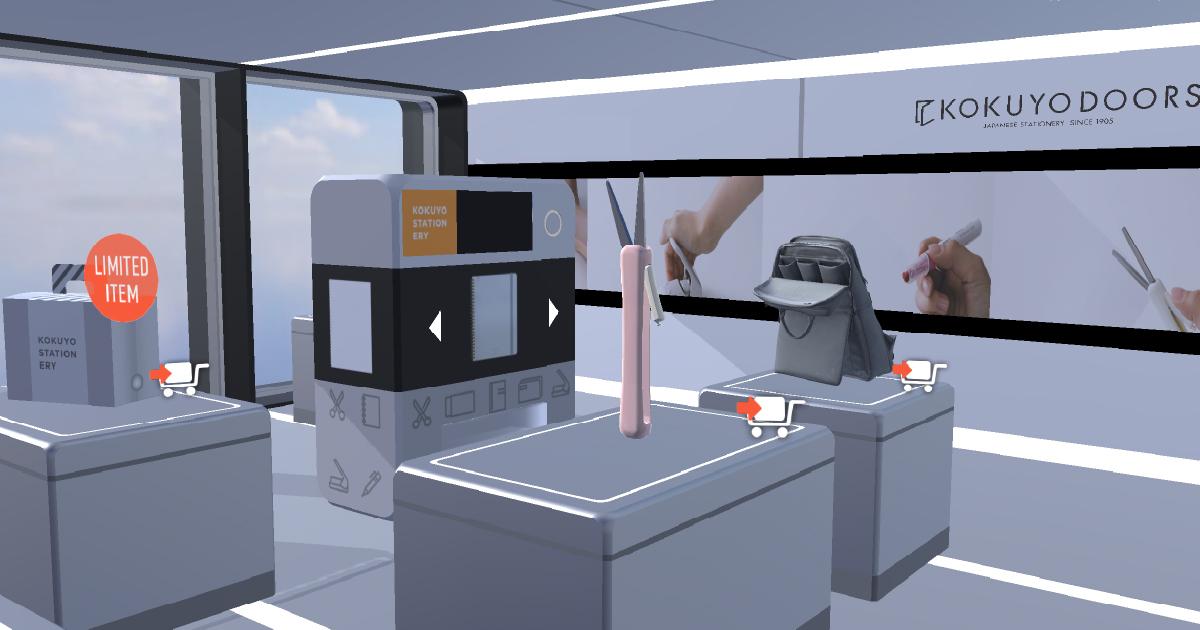
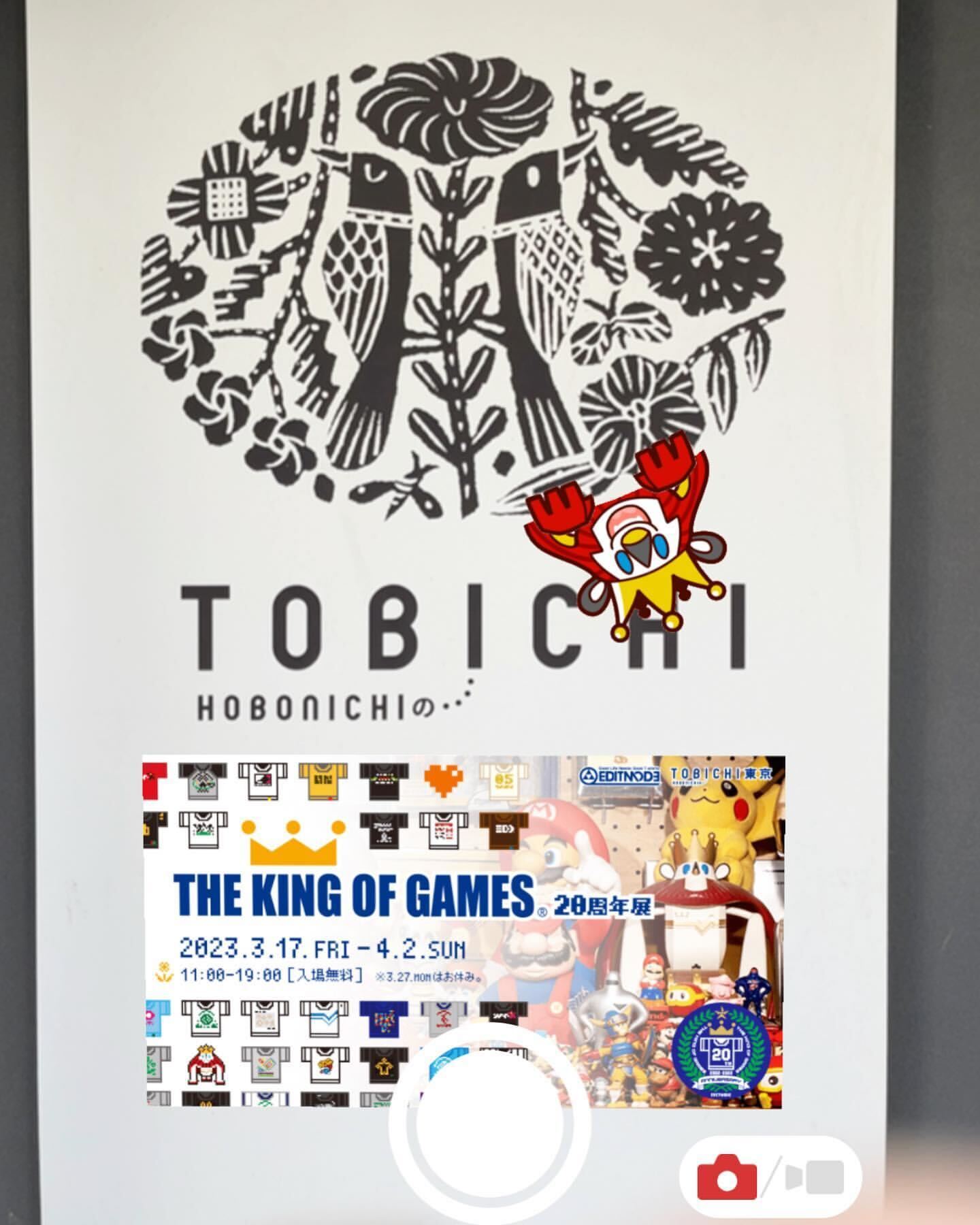
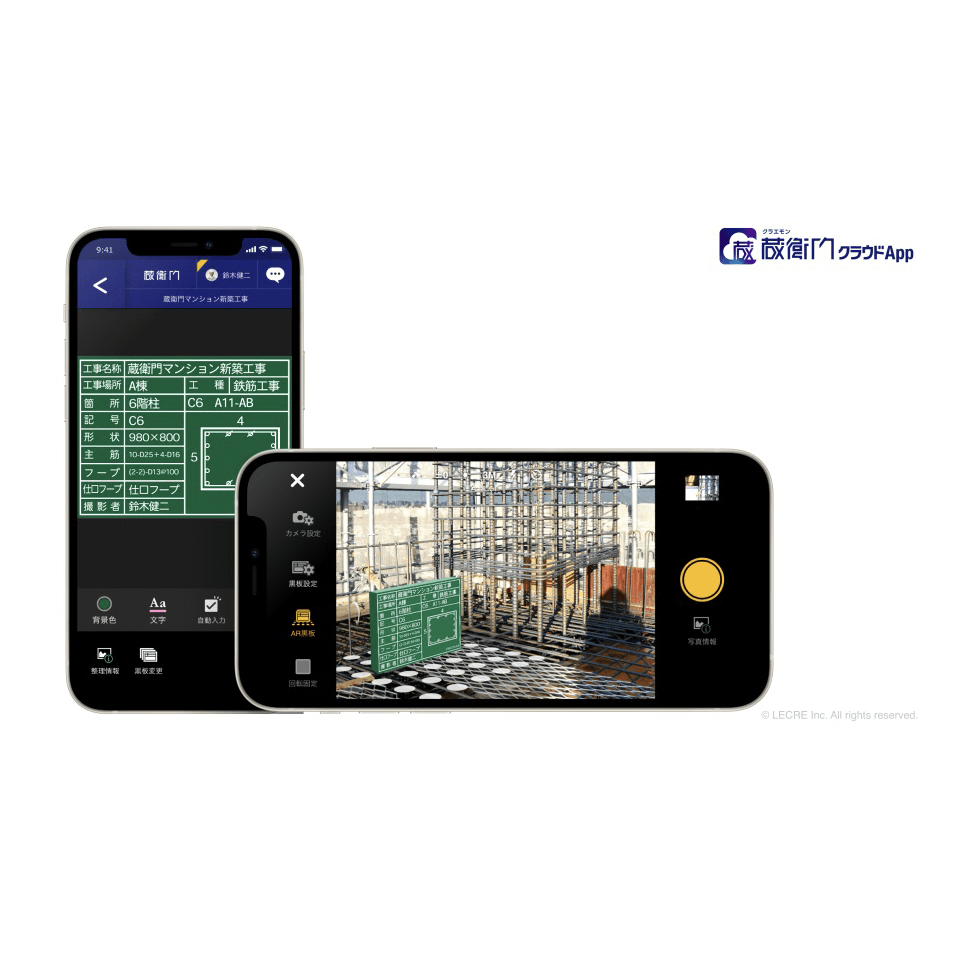
AR / VR 技術をはじめとする
インタラクティブコンテンツの
企画・制作およびコンサルティング
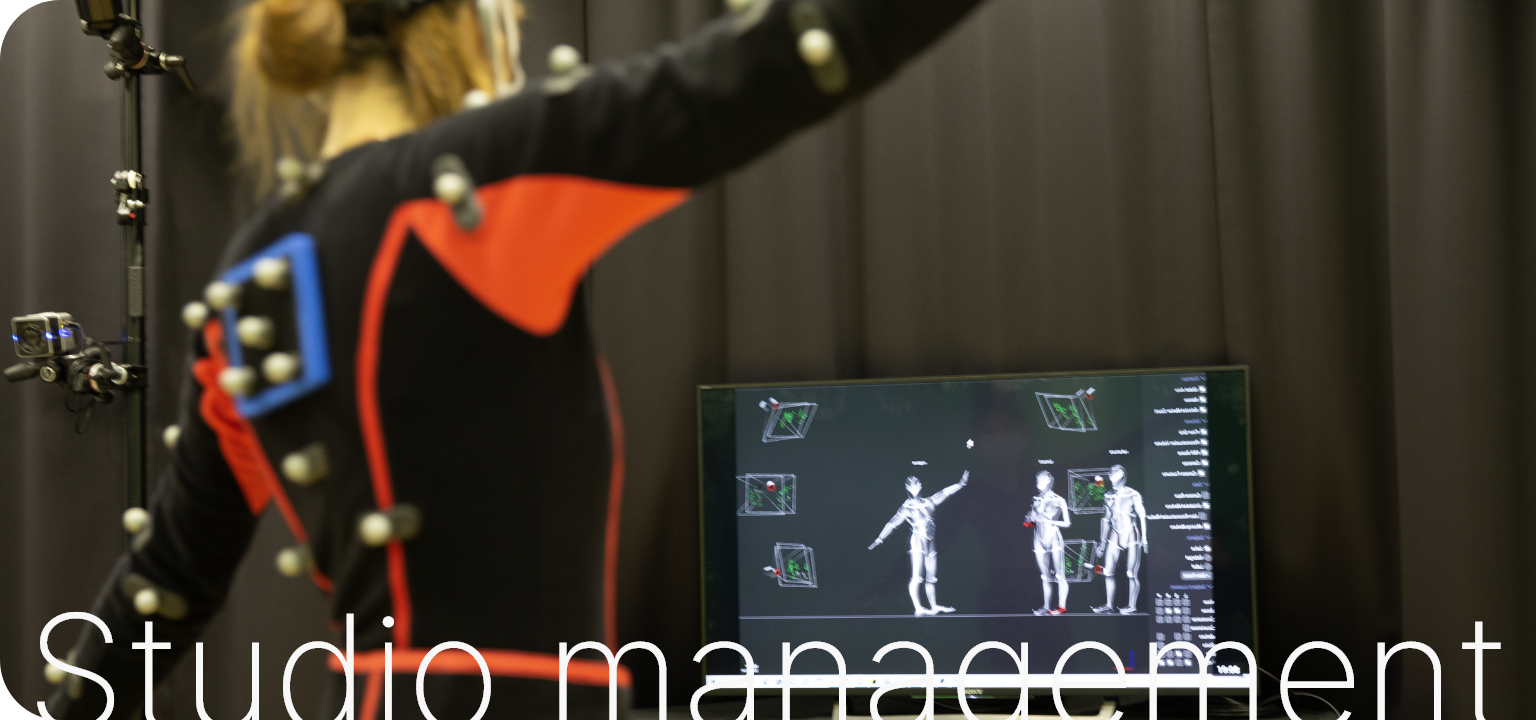

AR / VR コンテンツ撮影に特化した
スタジオの運営


⾦沢在住のクリエーターや
大学生などに技術を解放する
『A440 Kanazawa Lab.』の運営